Das Robotiklabor wurde im Januar 2010 gegründet.
Aktuell befinden sich dort verschiedene Roboter (Manipulatoren und mobile Roboter), die für Lehrveranstaltungen,
Bachlor- und Masterarbeiten und für Forschungs- und Entwicklungsprojekte genutzt werden.
Mit einem Klick in das nachfolgende Panoramabild kann man sich ein bischen im Labor umschauen.
| Bild |
Typ |
Beschreibung |
 |
Franka Emika |
Der Franka-Emika Roboter ist ein kooperativer Roboter (cobot) der letzten Robotergeneration. Er kann in ROS programmiert werden und braucht keinen Schutzzaun, da er flexible ist und mit Menschen zusammenarbeiten kann. |
 |
TurtleBot 2 |
Der Turtlebot 2 oder Kobuki ist ähnlich den modifizierten Roomba eine Experimentierplattform auf dem unterschiedliche Sensoren (3D Laserscanner, 3D Kameras, 360 Grad Kameeras) zum Einsatz kommen. Wir haben davon einen kleine Swarm von 8 Robotern.
Sie sind leicht und portable und können in gut strukturierten Umgebungen (Büros) eingesetzt werden.
|
 |
Drohnen |
Diverse Micro Drohnen (~10) z.B. DJI Mavics, Phantoms, FPv ... Sie werden bei uns zum Erkunden, 3D Mapping und als akitver Bildverarbeitungssensor auf einer Bodenplattform eingesetzt.
Technisch können Sie autonom Fliegen (z.B. GPS Trajektorien) und liefern neben den Bilddaten auch die Flugsensordaten. |
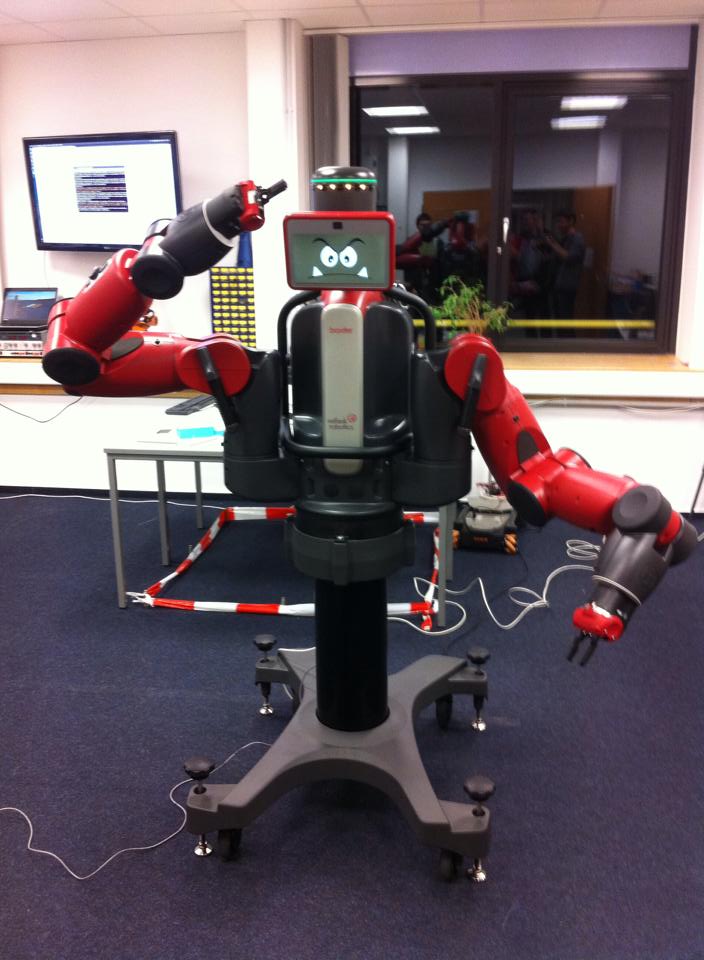 |
Baxter |
Der Baxter-Roboter ist ein kooperativer humanoider Roboter. Er kann in ROS programmiert werden und braucht ebenfalls keinen Schutzzaun, da er flexible ist und mit Menschen zusammenarbeiten kann. |
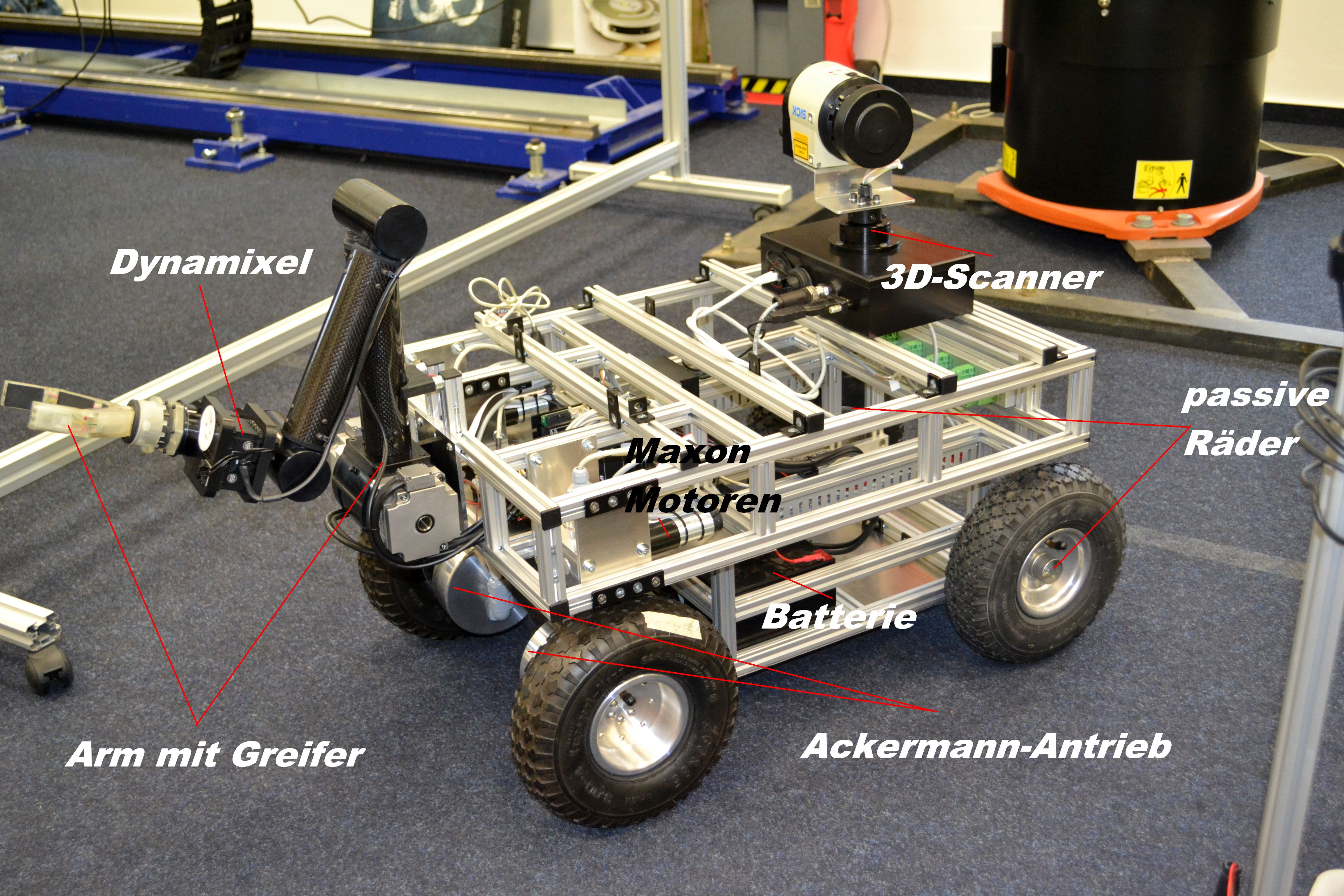 |
Volksbot Ackermann |
VolksBot-Ackermann ist ein Roboterbaukastensystem für den professionellen Forschungs-, Entwicklungs- und Ausbildungsbereich vom
Fraunhofer IAIS. Unsere Ackermann Version ist eine mit einem 3D-Laserscanner, IR-Kamera und einem Arm.
Dieser Prototy ist beispielseise als Erntehelfer in der Landwirtschaft einsetzbar. Der Roboter ist frei konfigurierbar und kann mittels
eines Notebooks (Ubuntu Linux / ROS) gesteuert werden.
|
 |
Volksbot RT 3 |
VolksBot RT 3 ist ein Roboterbaukastensystem für den professionellen Forschungs-, Entwicklungs- und Ausbildungsbereich.
Mit Hilfe des Baukastens vom Fraunhofer IAIS in Sankt Augustin können sehr schnell
und preiswert unterschiedlichste Varianten mobiler Roboter hergestellt werden.
Dieses so genannte Rapid Prototyping erlaubt uns den Roboter für
unterschiedliche Experimente mit jeweils unterschiedlichen Sensoren zu nutzen. Neben GPS, 2D Laserscannern und Kameras kommen hier
auch Infrarotkameras und 3D Laserscanner zum Einsatz.
Typische Anwendungen sind das 2D und 3D Mapping (SLAM). Als Steuerungssoftware wird
ROS verwendet. Weiterhin verwenden wir Robotiksoftware
verschiedener Open Source Projekte zu deren Weiterentwicklung wir ebenfalls beitragen
(OpenVolksbot).
|
 |
Handycart: FTS Daum und Partner |
Das Fahrlose Transportsystem (FTS) wird in Industriehallen zum Transport von Lasten verwendet. Es ist 250 kg schwer und kann
bis zu 200 kg Gewicht tragen. In Industriehallen folgt es einer auf dem Boden aufgeklebten Spur. Das FTS-Fahrzeug ist bei
uns erweitert worden, so dass es autonome fährt. Dazu wird der Roboter nun über einen Laptop gesteuert und besitzt jeweils vorne und
hinten eine Sick PLS Laserscanner, der die Umgebung vor und hinter dem Roboter erfasst (180 Grad) und sichert. Eine automatische
Ladestation versorgt den Roboter kontinuierlich mit neuer Energie.
|
 |
Roombas von IRobot |
Die Roombas sind ursprünglich autonome Staubsauger. IRobot hat den Roombas eine API spendiert, so dass diese darüber programmiert
werden können. Dazu werden die Roombas mit Laptops, 2D / 3D Laserscanner und Kameras aufgerüstet und als programmierbare Roboter
verwendet. Über die Ladestation des Roombas wird das ganze Robotiksystem mit Energie versorgt. Wie die anderen Roboter werden auch die
Roombas mittels ROS gesteuert.
|
 |
Rovio von WowWee |
Der Rovio ist eine mobile WebCam. Er kann über einen beliebigen Browser (fern-)gesteuert werden. So können interessante Experimente live und online
mitverfolgt werden. |
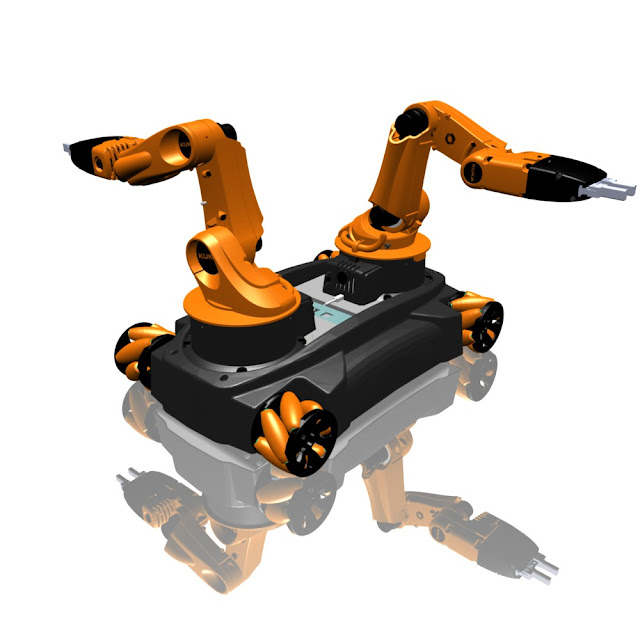 |
youBot von Kuka |
Der youBot ist eine fahrbare Plattform mit zwei Roboterarmen und Mecanum-Rädern von Kuka. Er ist als Plattform f¨r Forschung und Lehre konzipiert. |
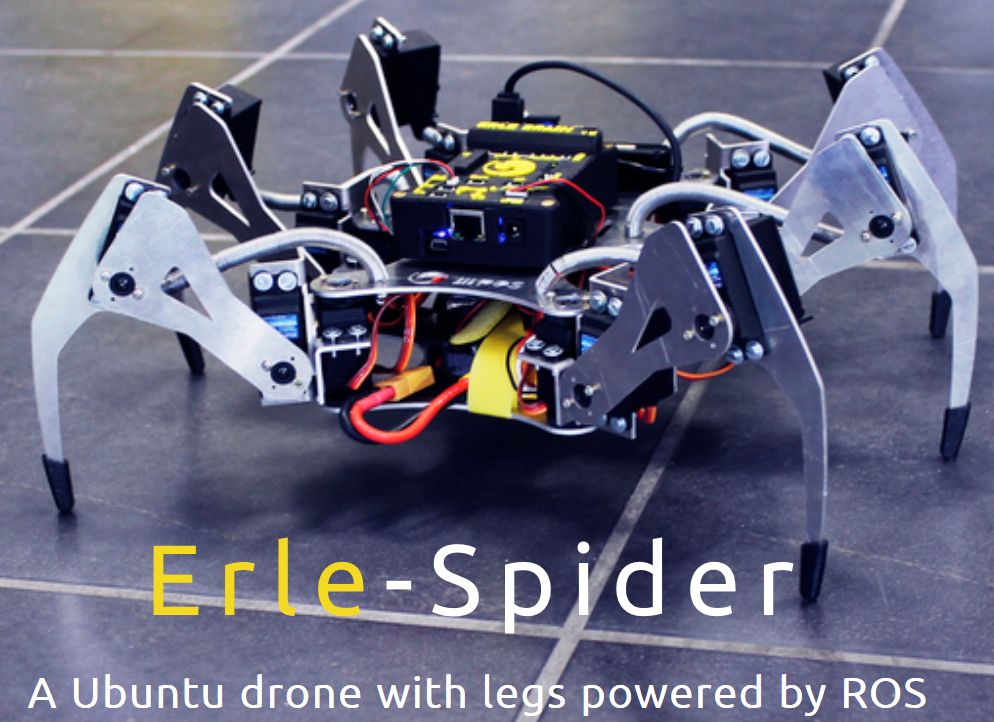 |
Laufmaschinen |
Laufmaschinen haben viele Beine und Motoren und sind deshalb Kinematisch ansprucksvolle Robotersysteme mit komplexen Bewegungsmustern. |
Neben den Robotern gibt es noch zahlreiche Sensoren wie beispielsweise, Kameras, Stereo-Kameras, 360 Grad Kamera, Gopro riggs, 2D / 3D Laserscanner, Schwenk / Neige Vorrichtungen, Infrarotkameras,
Ladegeräte .... Die Sensoren werden natürlich ebenfalls in Lehrveranstaltungen und Forschungsprojekten verwendet (Stichwort: Sensordatenfusion).
Die nachfolgende Bildergalerie auf Google Fotos gibt einen kleinen Eindruck:
LF Autonome Systeme